די אַפּליקאַציע און אַרבעט פּרינציפּ פון מיניאַטורלינעאַר סטעפּער מאָטאָרןאויף מעדיצינישע שפּריצן איז אַ קאָמפּליצירטער פּראָצעס וואָס נעמט אַרײַן הויך-פּונקטלעכע מעכאַנישע און עלעקטראָנישע קאָנטראָלן ווי אויך מעדיצינישע טעכנאָלאָגיע. די אַפּליקאַציע און אַרבעטס-פּרינציפּ וועט ווערן אויסגעאַרבעט אונטן צו דערגרייכן די נויטווענדיקייט פון 1500 ווערטער.
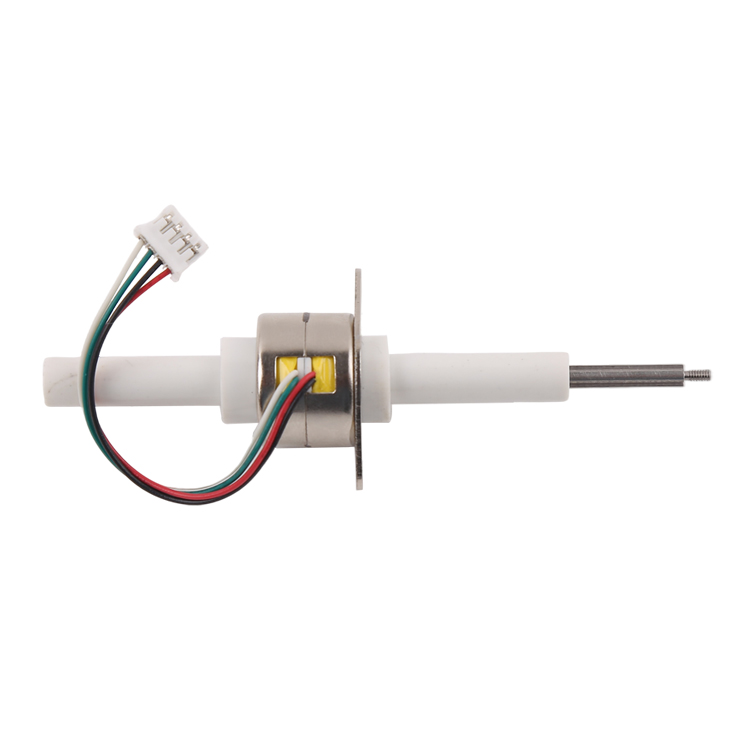
איצט, מיר דאַרפֿן פֿאַרשטיין די גרונט־סטרוקטור און כאַראַקטעריסטיקס פֿון אַ מיניאַטור לינעאַרער סטעפּינג מאָטאָר. אַ מיניאַטור לינעאַרער סטעפּינג מאָטאָר איז אַ מיטל וואָס קאָנווערטירט ראָטאַציע־באַוועגונג אין לינעאַרער באַוועגונג מיט הויכער פּינטלעכקייט, הויכער גיכקייט און הויכער ריפּיטאַביליטי. אין מעדיצינישע שפּריצן, קענען מיניאַטור לינעאַרע סטעפּינג מאָטאָרן פּינקטלעך קאָנטראָלירן די פּיסטאָן־באַוועגונג פֿון דער שפּריץ, כּדי צו דערגרייכן די פּינקטלעכע אינדזשעקציע פֿון מעדיקאַמענטן.
אין דער אַפּליקאַציע פון מעדיצינישע שפּריצן, שפּילן מיניאַטור לינעאַר סטעפּער מאָטאָרן דער הויפּט די פאלגענדע ראָלעס:
ערשטנס, גענויע קאנטראל פון די אינדזשעקציע וואליום
מיניאַטור לינעאַר סטעפּער מאָטאָרןקען זיכער מאַכן אַז די סומע פון מעדיצין וואָס ווערט ינדזשעקטעד יעדעס מאָל איז פּינקטלעך דורך פּינקטלעך קאָנטראָלירן די דיספּלייסמאַנט פון די פּיסטאָן. דאָס איז קריטיש פֿאַר מעדיצינישע סצענאַרן וואָס דאַרפן פּינקטלעך קאָנטראָל פון מעדיצין דאָזע, אַזאַ ווי ינסולין ינדזשעקשאַן און כעמאָטעראַפּי מעדיצין ינדזשעקשאַן. פּינקטלעך קאָנטראָל פון די ינדזשעקשאַן באַנד קען זיין דערגרייכט דורך פּראָגראַממינג די מאָטאָר ס אַפּערייטינג פּאַראַמעטערס, אַזאַ ווי גיכקייַט, אַקסעלעריישאַן און שטעלע.
二, גלאַט ינדזשעקשאַן
די באַוועגונג קעראַקטעריסטיקס פון מיניאַטור לינעאַר סטעפּער מאָטאָרן געבן זיי די מעגלעכקייט צו דערגרייכן אַ גלאַט ינדזשעקשאַן פּראָצעס. קאַמפּערד מיט טראַדיציאָנעלע מעכאַנישע שפּריצן,מיקראָ לינעאַר סטעפּער מאָטאָר-געטריבענע שפּריצן פּראָדוצירן נישט קיין שאַקס און ווייבריישאַנז בעת דעם אינדזשעקשאַן פּראָצעס, אַזוי רעדוצירט ווייטיק און ומבאַקוועמקייט פֿאַר פּאַציענטן. אין דער זעלביקער צייט, העלפֿט דער גלאַטער אינדזשעקשאַן פּראָצעס אויך רעדוצירן מעדיצין וויסט און זייַט יפעקץ.

צוועק, אויטאמאציע און אינטעליגענץ
די אַפּליקאַציע פון מיניאַטורלינעאַר סטעפּער מאָטאָרןמאכט דעם מעדיצינישן אינדזשעקטאָר אויסגעשטאַט מיט אויטאָמאַטיזאַציע און אינטעליגענץ. דורך דער קאָמבינאַציע מיט סענסאָרן און קאָנטראָל סיסטעמען, קענען פֿאַרשידענע פּאַראַמעטערס בעת דעם אינדזשעקשאַן פּראָצעס, ווי אינדזשעקשאַן גיכקייט און אינדזשעקשאַן באַנד, ווערן מאָניטאָרירט אין פאַקטישער צייט און אויטאָמאַטיש אַדזשאַסטיד ווי נויטיק. אין דערצו, קען מען דערגרייכן אויטאָמאַטיזירטע אינדזשעקשאַן דורך ווײַט קאָנטראָל אָדער פֿאָרגעשטעלטע פּראָגראַמען צו פֿאַרבעסערן מעדיצינישע עפֿעקטיווקייט און באַקוועמלעכקייט.

ווייטער, לאָמיר אויספאָרשן דעם אַרבעט־פּרינציפּ פֿון מיניאַטורלינעאַר סטעפּער מאָטאָרןאויף מעדיצינישע אינדזשעקטאָרס אין דעטאַל.
דער ארבעטס-פרינציף פון מיניאטור לינעארע סטעפער מאטארן איז באזירט אויף עלעקטראמאגנעטישע אינדוקציע און סטעפינג קאנטראל. דער מאטאר אנטהאלט א סעט פון שפולן און שטענדיגע מאגנעטן אינעווייניג, און ווען די שפולן ווערן ענערדזשייזירט, שאפן זיי א מאגנעטישן פעלד וואס אינטעראקטירט מיט די שטענדיגע מאגנעטן, אזוי שאפן א דריי-מארק וואס שטופט דעם פיסטאן צו באוועגן זיך אין א גלייכער ליניע. דורך קאנטראלירן די סיקווענץ פון ענערדזשייזאציע פון די שפולן און די מאס פון שטראם, קען מען דערגרייכן א גענויע קאנטראל פון דער פיסטאן באוועגונג.

אין מעדיצינישע שפּריץ אַפּליקאַציעס, מיניאַטור לינעאַר סטעפּער מאָטאָרן זענען געוויינטלעך קאַמביינד מיט אַ קאָנטראָל סיסטעם און סענסאָרן. די קאָנטראָל סיסטעם שיקט קאָנטראָל סיגנאַלן צו דעם מאָטאָר באַזירט אויף פאָרגעשטעלטע ינדזשעקשאַן פּאַראַמעטערס און רעאַל-צייט מאָניטאָרינג פון די ינדזשעקשאַן סטאַטוס. נאָך באַקומען דעם סיגנאַל, דער מאָטאָר קאָנווערטירט די ראָטייטינג באַוועגונג אין די לינעאַר באַוועגונג פון די פּיסטאָן דורך די ינערלעך עלעקטראָמאַגנעטישע קאַנווערזשאַן און מעטשאַניקאַל טראַנסמיסיע מעקאַניזאַם. אין דער זעלביקער צייט, דער סענסאָר מאָניטאָרס די שטעלע און גיכקייַט פון די פּיסטאָן אין רעאַל צייט און פידז די אינפֿאָרמאַציע צוריק צו די קאָנטראָל סיסטעם צו דערגרייכן פּינטלעך פארמאכט-לופּ קאָנטראָל.
עס איז ווערט צו באַמערקן אַז די אַפּליקאַציע פון מיניאַטור לינעאַר סטעפּער מאָטאָרן אין מעדיצינישע שפּריצן אויך ינוואַלווז עטלעכע שליסל טעקנאַלאַדזשיז און טשאַלאַנדזשיז. למשל, ווי צו ענשור די פעסטקייט און פאַרלאָזלעכקייט פון די מאָטאָרן בעשאַס לאַנג-צייט אָפּעראַציע; ווי צו רעדוצירן די ראַש און ווייבריישאַן פון די מאָטאָרן צו פֿאַרבעסערן פּאַציענט טרייסט; און ווי צו דערגרייכן שנעל ענטפער און פּינטלעך קאָנטראָל פון די מאָטאָרן צו טרעפן די באדערפענישן פון פאַרשידענע מעדיצינישע סצענאַריאָוז. די לייזונג פון די פּראָבלעמען דאַרף צו פאַרלאָזן זיך אויף די פולשטענדיק אַפּלאַקיישאַן פון מולטידיסציפּלינאַרי וויסן אַזאַ ווי אַוואַנסירטע מאַטעריאַל וויסנשאַפֿט, עלעקטראָניש טעכנאָלאָגיע און קאָנטראָל טעאָריע.
דערצו, מיט דער קאנטינעווער אנטוויקלונג פון מעדיצינישער טעכנולוגיע, וועט די אנווענדונג פון מיניאטור לינעארע סטעפער מאטארן אין מעדיצינישע אינדזשעקטארן ווייטער אויסברייטערן און אינוואצירן. למשל, דורך דער איינפיר פון מער פארגעשריטענע סענסארן און אלגאריטמען, קען מען דערגרייכן מער גענויע אינדזשעקציע קאנטראל און קלוגערע מעדיצינישע סערוויסעס; דורך די פארבינדונג און אינטעגראציע מיט אנדערע מעדיצינישע עקוויפמענט, קען מען דערגרייכן מער עפעקטיווע מעדיצינישע פראצעסן און בעסערע מעדיצינישע דערפארונג.
די אנווענדונג פון מיניאַטור לינעאַרע סטעפּער מאָטאָרן אויף מעדיצינישע אינדזשעקטאָרן איז אַ פעלד פול מיט טשאַלאַנדזשיז און געלעגנהייטן. דורך טיפע פאָרשונג און קעסיידערדיקע כידעש, קענען מיר דערוואַרטן אַז עס וועט שפּילן אַ מער וויכטיקע און ברייטע ראָלע אין דער צוקונפֿט מעדיצינישער פעלד און מאַכן גרעסערע בייַשטייַער צו מענטשנס געזונט און מעדיציניש וואוילזיין.
דאָס אויבנדערמאָנטע איז אַ דעטאַלירטע באַשרײַבונג פֿון דער אַפּליקאַציע און אַרבעטס־פּרינציפּ פֿון מיניאַטור לינעאַרע סטעפּער מאָטאָרן אין מעדיצינישע אינדזשעקטאָרן. צוליב פּלאַץ־באַגרענעצונגען, איז דאָ נאָר אַ קורצע הקדמה צו די גרונט־פּרינציפּן און אַפּליקאַציע־סצענאַרן, אין פאַקט זענען דאָ מער פרטים און טעכנישע פּראָבלעמען וואָס דאַרפֿן ווײַטער אויסגעפֿאָרשט און געפֿאָרשט ווערן. מיר האָפן אַז דער אַרטיקל קען אײַך צושטעלן אַ פֿאָרלעפֿיקע פֿאַרשטענדעניש און וויסן פֿון דער אַפּליקאַציע און אַרבעטס־פּרינציפּ פֿון מיניאַטור לינעאַרע סטעפּער מאָטאָרן אין מעדיצינישע אינדזשעקטאָרן.
פּאָסט צייט: 24סטן אַפּריל 2024